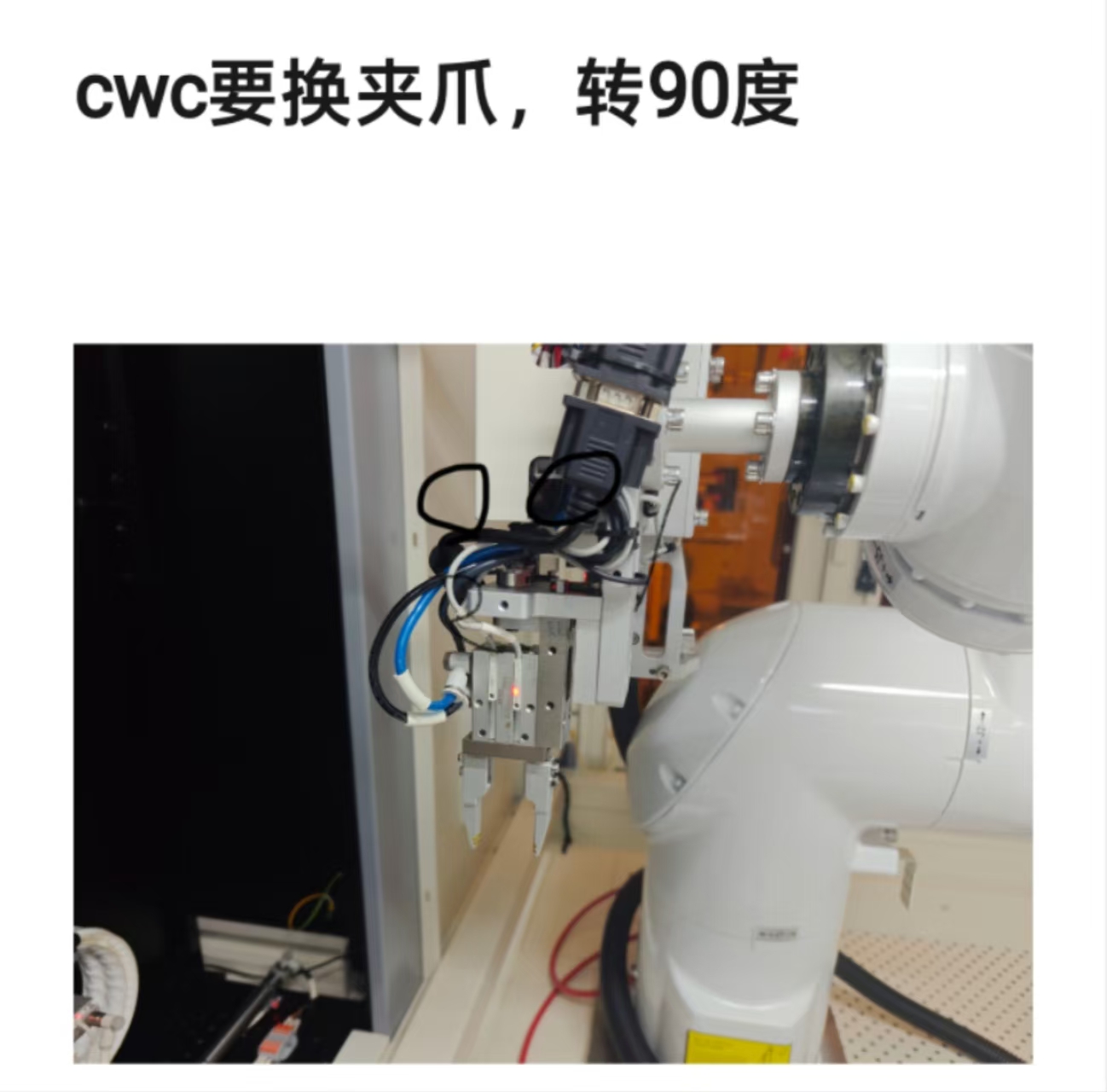
六轴机械手主要对应模拟人体的肢体方向运动,做cwc产品是时换夹爪,换完要对IO接口调试,特别是两个传感器的校准
钥匙调到使能状态,手按住伺服可以六轴手动定点
主要是料盘的定点,机械手需要动作连贯,要设置一个初始点,然后一个过渡点,最后才设置目标点位
目前只更新了3EA和2NJ的程序,后续其他程序要及时更新,防止撞击
料盘定点
1.料盘上方
2.入口点
3,扫描料盘是否有料
4.进入

苏苏
六轴机械手主要对应模拟人体的肢体方向运动,做cwc产品是时换夹爪,换完要对IO接口调试,特别是两个传感器的校准
钥匙调到使能状态,手按住伺服可以六轴手动定点
主要是料盘的定点,机械手需要动作连贯,要设置一个初始点,然后一个过渡点,最后才设置目标点位
目前只更新了3EA和2NJ的程序,后续其他程序要及时更新,防止撞击
料盘定点
1.料盘上方
2.入口点
3,扫描料盘是否有料
4.进入